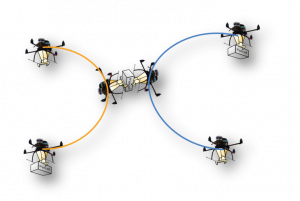
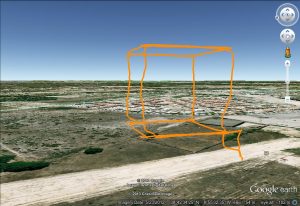
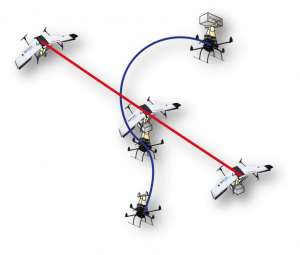
Applications are invited for a fully funded Post-doc Researcher position, at the Institute for Systems and Robotics (ISR), Instituto Superior Técnico (IST), University of Lisbon, Portugal. The selected candidate will be part of the research team of project REPLACE (https://brunojnguerreiro.eu/research/replace), addressing the fast package delivery in urban environments using drones, explicitly considering their limitations by using drone relays to enable effective package delivery to destinations that go beyond the flight range and autonomy of a single drone.
This position targets candidates holding a PhD degree (or equivalent). The selected candidate is expected to work on the following topics, depending on the selected candidate’s background, preference, and experience: task allocation and planning, on-line planning and control, multi-vehicle close interaction and control to exchange packages, environment perception and simultaneous localization and mapping, as well as vehicle and sensor integration for experimental testing.
The research will be conducted at the Dynamic Systems and Ocean Robotics group of the Institute for Systems and Robotics (ISR) (http://welcome.isr.tecnico.ulisboa.pt/projects_cat/dsor/), supervised by Bruno Guerreiro and also in close interaction with the rest of the project and group research team. ISR/IST is the home to more than 40 PhDs and part of the LARSyS (Laboratory for Robotics and Engineering Systems – http://www.larsys.pt). ISR/IST is engaged in a new generation of research challenges pushing the frontiers of knowledge, while offering world-class doctoral training with top universities (e.g. dual/joint degrees with MIT, EPFL, CMU) and fueling the collaboration with industry. ISR/IST develops state-of-the-art engineering solutions and projects with a clear societal impact, and has a long track record of participation in EU and other international projects (http://www.isr.tecnico.ulisboa.pt).
Requirements: the candidates are expected to have a PhD of equivalent degree with strong background in control, robotics, computer science, aerospace or mechatronics engineering or a mix of these areas. Good programming skills in Matlab, C++, Python, and experience with ROS, are also expected. The working language is English, so good written and oral communication skills are also required.
Application info:
- Deadline: 23-January-2020
- Institutional announcement: http://ist-id.pt/files/sites/43/edital_dl57_en_jm_v2-1.pdf
- Link for application: https://dot.ist-id.tecnico.ulisboa.pt/admissions/contest/571960794808372
Contract info:
- Duration: 15 months (full time)
- Foreseen starting date: March 2020
- Gross monthly salary: 2128.34 € (14 times per year, amounts to 29796.76€ / year)
- Other conditions: Social protection and free (with small access fees) healthcare in public network
- Work place: ISR-Lisbon – IST Alameda campus, Lisbon, Portugal
Documents to be submitted:
- PhD certificate
- PhD Thesis (translation to English if not originally in Portuguese);
- Curriculum Vitae (structured according to the announcement);
- Scientific project, focusing on designing and testing strategies for fast and efficient parcel delivery in dynamic environments using multiple drones;
- Degree equivalence request, if necessary (payment may be delayed until call results are known), according to the instruction at the Ulisboa’s website (https://www.ulisboa.pt/en/info/foreign-qualifications-0) and at the government website (https://www.dges.gov.pt/en/pagina/degree-and-diploma-recognition?plid=1536)
For further information, send an email to bguerreiro@isr.tecnico.ulisboa.pt , if possible including the documents to be submitted through the call website.
If you want to know more about living/moving to Lisbon, Portugal, you can start at https://tecnico.ulisboa.pt/en/campus-life/living-at-tecnico and https://www.livinginportugal.com/en .