REPLACE – fast delivery in urban environments using drone RElays: PLAnning, Control, and Estimation
This project aims to address several scientific and technological challenges towards fast package delivery in urban environments using drones. As there are severe autonomy constraints to the endurance and travel distance of drones, this project will explicitly consider those limitations and use drone relays to enable effective package delivery to destinations that go beyond the flight range and autonomy of a single drone. Interestingly enough, this raises other scientific challenges in terms of planning of optimal and efficient trajectories for a team of drones deployed throughout a city, for the cooperative control of several drones for package transportation and relay maneuvers, as well as for estimation of vehicles and package location during transportation and relay maneuvers. The research plan will start by addressing single vehicle control and estimation strategies, and progressively evolve into cooperative control, estimation and planning for coordinated relay transportation.
Project dedicated webpage: http://replace.isr.tecnico.ulisboa.pt/
References: FCT – PTDC/EEI-AUT/32107/2017; Portugal 2020 – LISBOA-01-0145-FEDER-032107
Funding: Fundação para a Ciência e a Tecnologia (FCT), Portugal; Lisboa 2020, Portugal 2020, FEDER.


Project Partners:
- Main contractor: Institute for Systems and Robotics – Lisbon (ISR), LARSYS, Associação do Instituto Superior Técnico para a Investigação e o Desenvolvimento (IST-ID).
- Participating Institution: Mechanical Engineering Institute (IDMEC), LAETA.

![]()
![]()
Research team: Bruno Guerreiro (PI, ISR; FCT/UNL), Rita Cunha (Co-PI, ISR/IST), Paulo Oliveira (IDMEC), Carlos Silvestre (ISR/IST)
Main Goals
- Fundamental science in robotics and control
- Develop novel strategies for parcel transportation in urban environments
- Using a single UAV
- Multiple UAVs with in-flight relay maneuvers
- Design new planning, control, and estimation methods that are
- Reliable and independent of external sensors and processing units
- Use hybrid systems and analysis for improved robustness
Application Scenarios
- Single vehicle in urban and dynamic environments:
- Focus on single drone parcel pick-up and delivery
- SLAM in dynamic environments
- Control methods with interaction with the environment
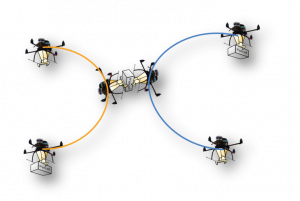
- Multiple vehicles with simple relay maneuvers:
- Cooperative drone delivery with simplified relay maneuver
- One drone just needs to be above the other for the parcel relay to be possible
- Focus on distributed real-time predictive algorithms
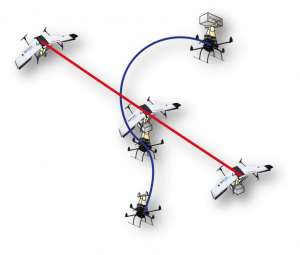
- Multiple vehicles with 3-D relay maneuvers:
- Focus on fast cooperative drone delivery with optimized relay maneuvers
- May result in acrobatic drone trajectories for the relay maneuver
- Work on full 3-D trajectory planning and control algorithms
Publications:
- P. Bai, B. Guerreiro, R. Cunha, P. Kornatowski, D. Floreano, and C. Sil-
vestre. “Wall-contact sliding control strategy for a 2D caged quadrotor”. In: 18th International Conference on Control, Automation and Systems (ICCAS). 2018, pp. 291-296. [Preprint] - M. Marques, B. Guerreiro, R. Cunha, and C. Silvestre. “Trajectory planning and control for drone replacement for multidrone cinematography”. In: 21st IFAC Symposium on Automatic Control in Aerospace (ACA2019). accepted. IFAC. 2019. [Preprint]
- M. Marques. “Trajectory planning and control for drone replacement
during formation flight”. MSc Thesis in Aerospace Engineering, Instituto Superior Técnico, 2018.
Job opportunities:
- Post-doc researcher contract call.
- Research Engineer/PhD Scholarship.
- Several MSc thesis themes under the scope of this project are available for IST students from MEEC, MEAer, MEMec, or any other interested student with an outstanding CV.